Introducing CARESSER: a framework for in situ learning robot social assistance from expert knowledge and demonstrations
Abstract
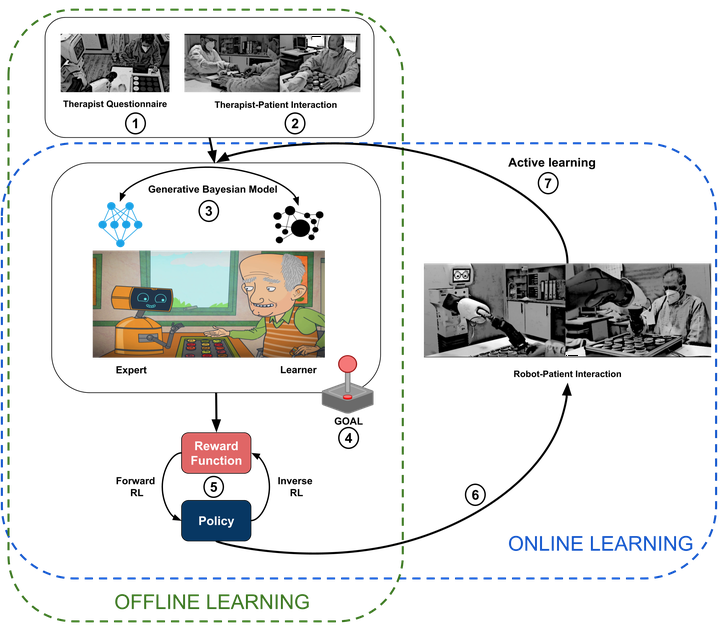
Socially assistive robots have the potential to augment and enhance therapist’s effectiveness in repetitive tasks such as cognitive therapies. However, their contribution has generally been limited as domain experts have not been fully involved in the entire pipeline of the design process as well as in the automatisation of the robots’ behaviour.In this article, we present aCtive leARning agEnt aSsiStive bEhaviouR (CARESSER), a novel framework that actively learns robotic assistive behaviour by leveraging the therapist’s expertise (knowledge-driven approach) and their demonstrations (data-driven approach). By exploiting that hybrid approach, the presented method enables in situ fast learning, in a fully autonomous fashion, of personalised patient-specific policies. With the purpose of evaluating our framework, we conducted two user studies in a daily care centre in which older adults affected by mild dementia and mild cognitive impairment (N=22) were requested to solve cognitive exercises with the support of a therapist and later on of a robot endowed with CARESSER. Results showed that: (i) the robot managed to keep the patients’ performance stable during the sessions even more so than the therapist; (ii) the assistance offered by the robot during the sessions eventually matched the therapist’s preferences. We conclude that CARESSER, with its stakeholder-centric design, can pave the way to new AI approaches that learn by leveraging human–human interactions along with human expertise, which has the benefits of speeding up the learning process, eliminating the need for the design of complex reward functions, and finally avoiding undesired states.