Abstract
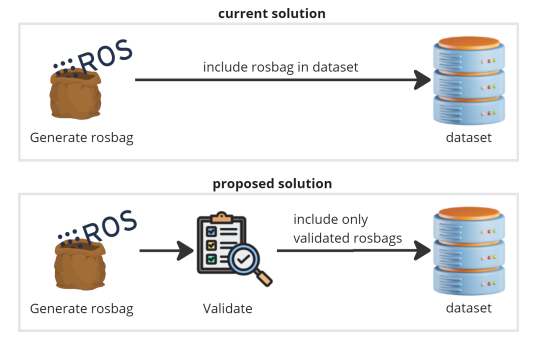
Datasets are cornerstones of research in Human-Robot Interaction (HRI) and allow researchers to structure observations for other peers to work on. These often store temporal sensitive information about the behaviour of humans and robots involved in the study, and take advantage of the state of the art in robot logging, e.g., rosbags. Depending on the research goal, an approach commonly adopted is to publish datasets alongside annotated semantic information about the interaction. However, validating and assessing the quality of the datasets has not been the main concern of the community. This work highlights the risk of publishing datasets without ensuring the synchronicity between objective and subjective measures and proposes a simple yet effective tool to mitigate it. The tool is evaluated on the rosbags of a popular dataset. Results show that 31.48% of its content contains indeterministic delays, causing the original synchronicity with the respective annotations to be lost.